mirror of
https://github.com/6-robot/waterplus_map_tools.git
synced 2025-09-15 12:59:09 +08:00
仿真项目3:
克隆WPR系列机器人仿真工具-3
| icons/classes | ||
| include | ||
| launch | ||
| media | ||
| meshes | ||
| msg | ||
| rviz | ||
| src | ||
| srv | ||
| CMakeLists.txt | ||
| package.xml | ||
| README.md | ||
| waterplus_map_tools_plugin.xml | ||
MapTools工具
使用步骤
- 安装ROS(kinetic/indigo)
- 配置好开发环境. 配置方法
- 安装依赖项:
sudo apt-get install ros-indigo-map-server
sudo apt-get install ros-indigo-navigation
sudo apt-get install ros-kinetic-map-server
sudo apt-get install ros-kinetic-navigation
- 获取源码:
cd ~/catkin_ws/src/
git clone https://github.com/6-robot/waterplus_map_tools.git
- 编译
cd ~/catkin_ws
catkin_make
平台介绍
MapTools工具是北京六部工坊科技有限公司为旗下WP系列机器人快速设置地图航点所设计的辅助工具,具有操作简单,效果直观的优点。目前支持启智ROS,启程3,启程4和启明1等型号的机器人.

操作方法
1. 打开地图
对于启智ROS这类使用本地开发模式的机器人,使用如下指令打开地图:
roslaunch waterplus_map_tools wpb_home_nav_test.launch
对于启明1这类使用远程开发模式的机器人,在机载电脑端运行如下指令:
roslaunch waterplus_map_tools add_waypoint_app.launch
然后在开发机端运行如下指令打开地图(记得先将ROS_MASTER_URI指向机器人):
roslaunch waterplus_map_tools add_waypoint_monitor.launch

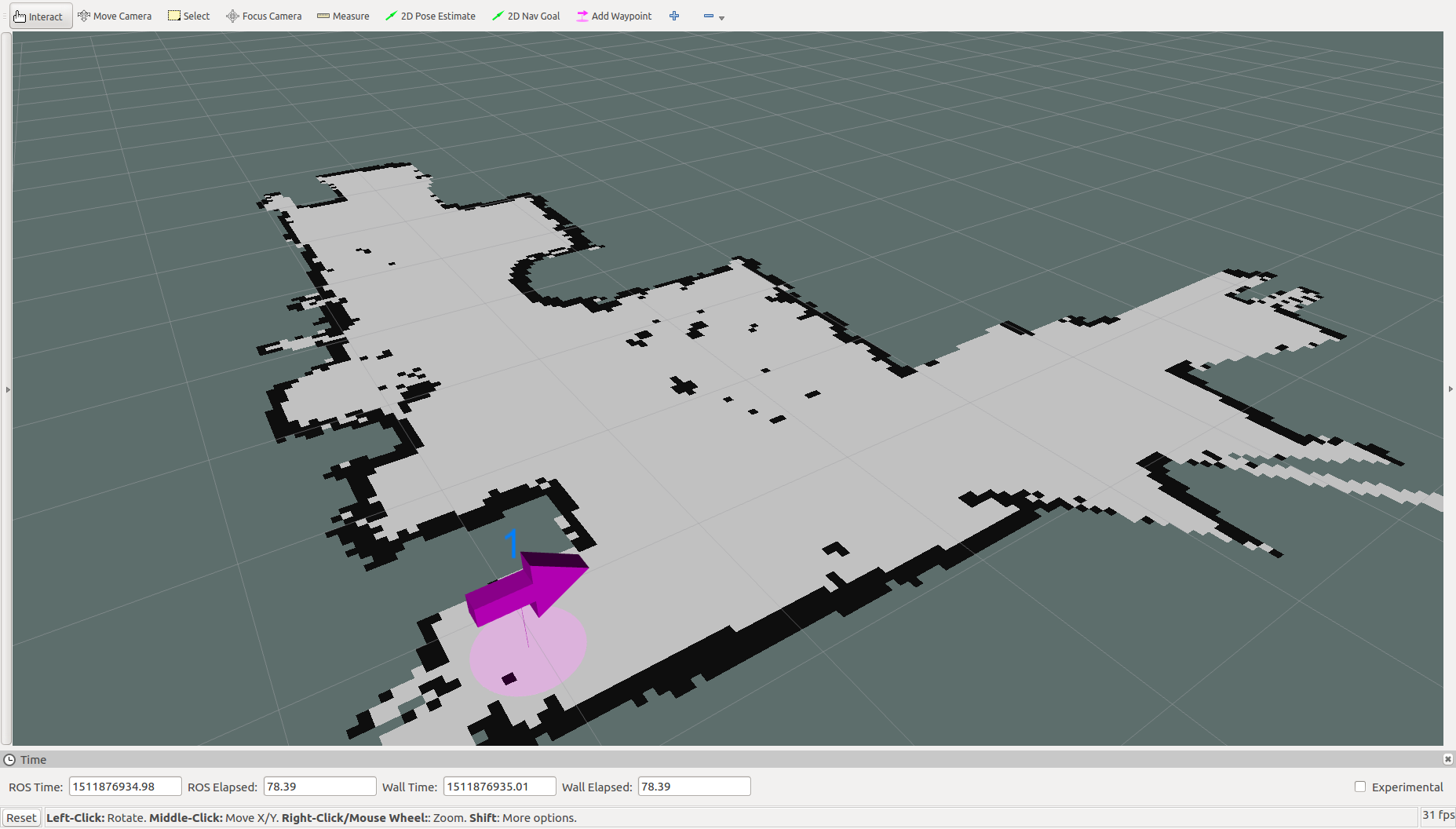
2. 设置航点
在Rviz工具栏点击"Add Waypoint"按钮可在地图上设置航点。



3. 保存航点
航点设置完毕后,使用如下指令保存航点:
rosrun waterplus_map_tools wp_saver
4. 航点遍历
航点设置完毕后,可以使用如下指令让机器人将设置的航点逐个遍历:
rosrun waterplus_map_tools wp_nav_test