mirror of
https://github.com/swri-robotics/mapviz.git
synced 2025-09-15 17:48:34 +08:00
15 lines
1.1 KiB
Markdown
15 lines
1.1 KiB
Markdown
Mapviz
|
|
======
|
|
| Humble | Jazzy | Kilted | Rolling |
|
|
| :--- | :--- | :--- | :--- |
|
|
| [](https://build.ros2.org/job/Hbin_uJ64__mapviz__ubuntu_jammy_amd64__binary/) | [](https://build.ros2.org/job/Jbin_uN64__mapviz__ubuntu_noble_amd64__binary/) | [](https://build.ros2.org/job/Kbin_uN64__mapviz__ubuntu_noble_amd64__binary/) | [](https://build.ros2.org/job/Rbin_uN64__mapviz__ubuntu_noble_amd64__binary/)
|
|
|
|
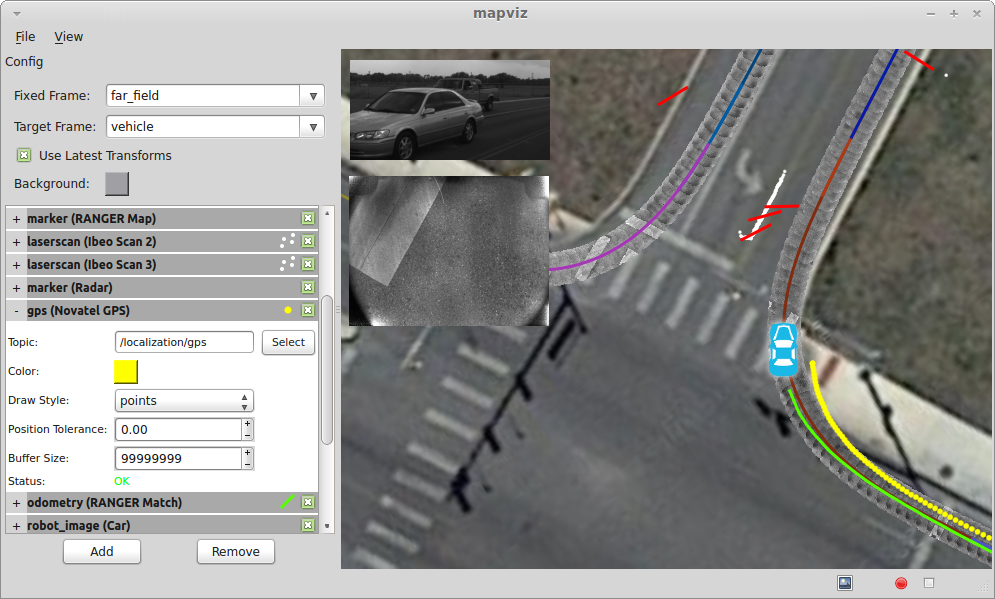
Mapviz is a [ROS](http://www.ros.org/) based visualization tool with a plug-in system similar to [RVIZ](http://wiki.ros.org/rviz) focused on visualizing 2D data.
|
|
|
|
|
|
|
|
Usage
|
|
-----
|
|
|
|
[View the documentation](https://swri-robotics.github.io/mapviz/) for usage information.
|