mirror of
https://github.com/chengyangkj/Ros_Qt5_Gui_App.git
synced 2025-09-15 12:58:58 +08:00
8.1 KiB
8.1 KiB
ROS Qt Deskotp GUI App
简体中文 | English
-
使用qt5实现ros机器人人机界面
-
注意!未经作者的许可,此代码仅用于学习,不能用于其他用途。
-
本仓库以分支的形式,长期维护各种有趣的ROS 可视化项目,持续更新中.....
-
欢迎在issues提交bug

一,菜单
二,安装教程
1,首先安装ros对qt pkg的支持(非必须)
melodic需要换成自己的ROS版本号
sudo apt-get install ros-melodic-qt-create
sudo apt-get install ros-melodic-qt-build
2,安装Qtmultimedia5依赖
程序依赖Qtmultimedia实现音频功能,因此需要安装依赖
sudo apt-get install qtmultimedia5-dev
3,编译
将软件包放入ros src软件包目录下:
catkin_make
4,运行
rosrun cyrobot_monitor cyrobot_monitor
5,windows编译
- 借助 ROS windows版本,编译后可在win10平板使用,安装教程古月学院 如何实现Windows ROS人机交互软件
三,分支
1. Qml版本demo
- ROS + QML + C++混合编程,使用qml自绘制地图,激光雷达点云等
- qml_hmi
3. Lite branch
- 此版本为《ROS人机交互软件开发》系列课程中实现的版本,CSDN例程版本
- simple
4,rviz菜单树分支
-
使用rviz自带的菜单树,去实现添加显示图层。master分支所有的图层及菜单均需要手动去写代码实现(并且目前仅支持部分图层显示),此分支调用librviz现成api,所有图层均可以实现,不用去手动创建图层菜单和display
-
5,ROS Qt Demo
-
cakin_create_qt_pkg 创建的原始包,cmakelist.txt已配置好改为qt5,可以直接编译运行
6,android版本分支 敬请期待
7,web版本分支 敬请期待
四,使用说明
1,连接主节点
- 使用前需要在连接界面连接rosore主节点

- ROS_MASTER_URI: ROS多机通讯主节点地址,如果只是单机通讯填127.0.0.1即可
- ROS_IP: 软件运行的机器的IP 如果是单机通讯填127.0.0.1即可
- 勾选使用环境变量连接就不使用界面设置的ROS_IP与ROS_MASTER_URI,需要在环境变量文件(~/.bashrc)配置好多机通讯环境变量,否则会导致连接失败,配置多机通讯教程csdn 博客
- 其他一些话题设置
- 勾选自动连接会在打开软件时进行自动连接
- 点击检测IP会自动检测本机IP并填入ros ip与ros master ip
2,设置
点击连接界面右下角,进行相关必要设置
功能介绍
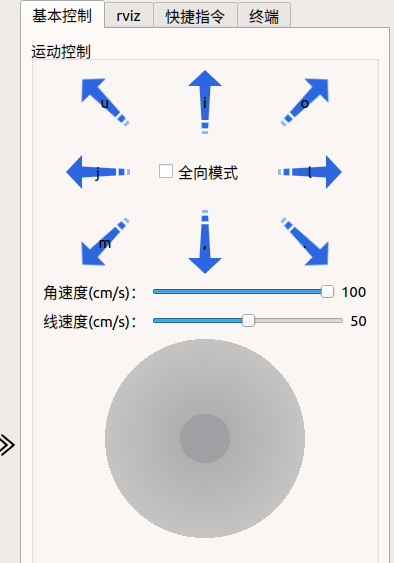
1,速度仪表盘
- 使用前须在菜单->设置->话题设置中设置odom话题:

2, 机器人速度控制
控制方式:
-
键盘热键控制
-
鼠标点击控制
-
虚拟摇杆控制
3, 电量显示
- 使用前须在菜单->设置->话题设置中设置电量话题(Std_msg/Float32)

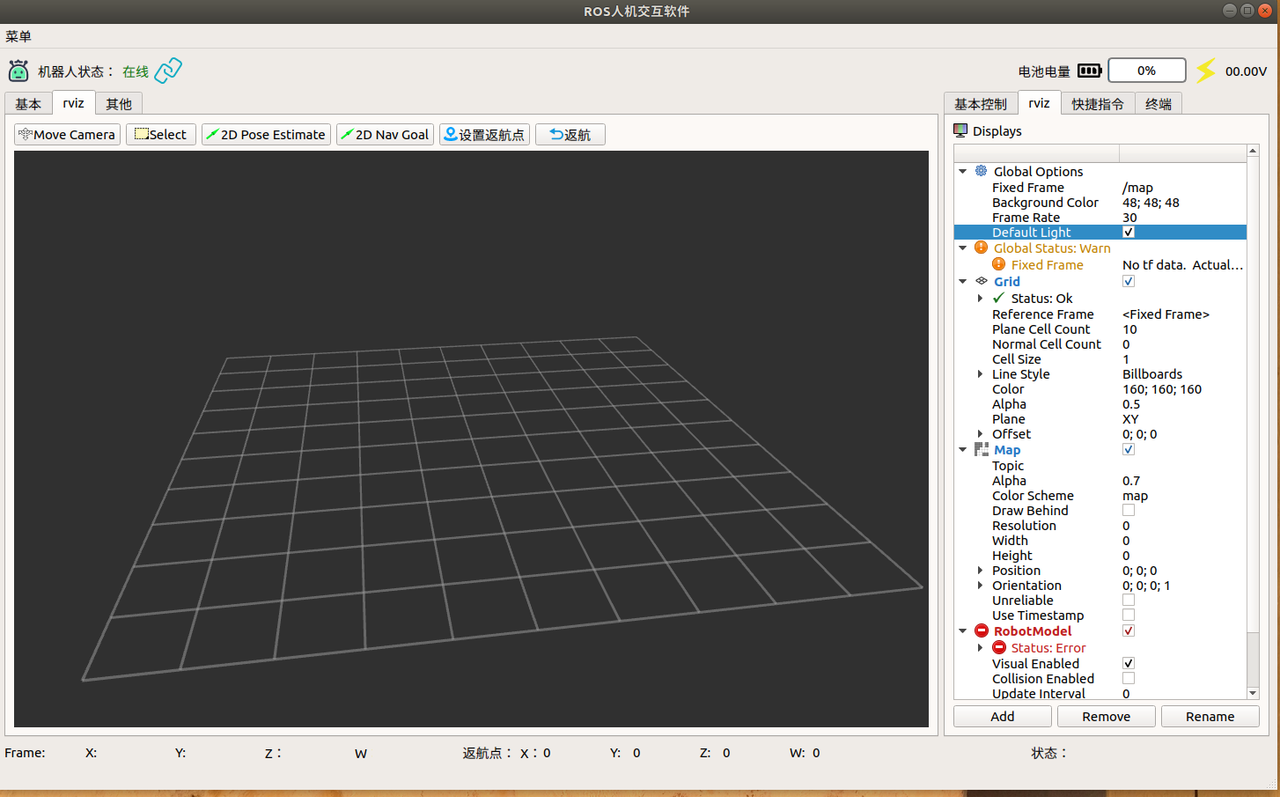
4, rviz模块

4.1 订阅map话题
4.2 激光雷达图层显示
4.3 设置导航初始点

4.4 设置导航目标点
4.5 定点返航
- 使用前须在菜单->设置->话题设置中设置amcl话题
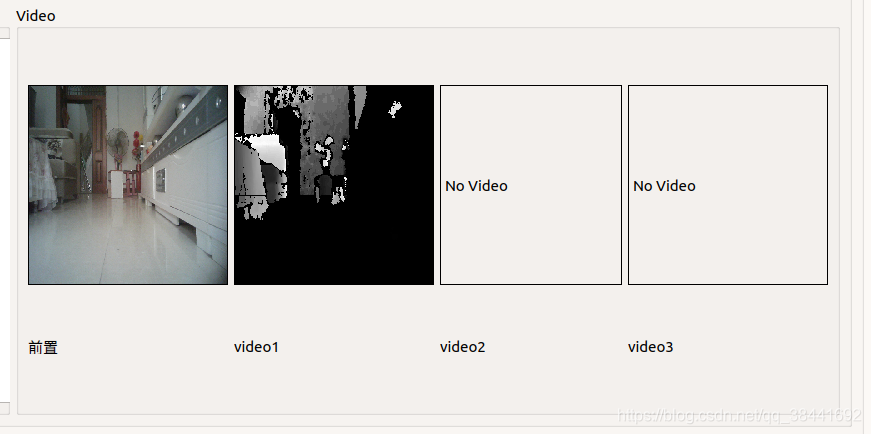
4.6 订阅图像话题
- 提供四个图像显示窗体,可以同时显示四个图像 解决卡顿问题,在video0订阅(image_raw/compressed)即compressed后的图像即可不卡顿,且video0只能订阅压缩后的图像
4.7 快捷指令


4.8 显示机器人模型
4.9 提供六种rviz工具

4.10 显示话题列表
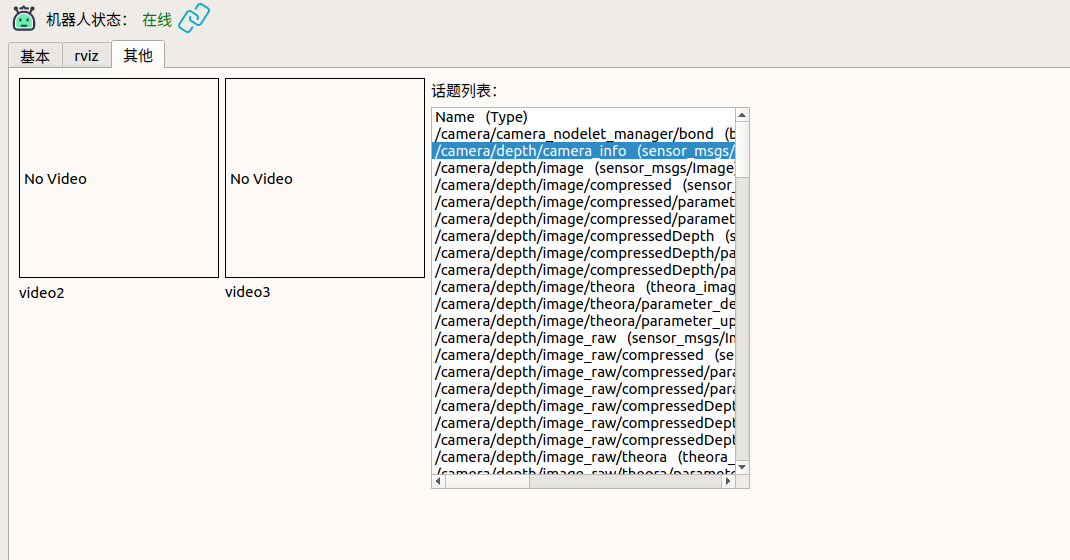 .
.
4.11 待完善....
开源协议
GNU GPL(GNU General Public License,GNU通用公共许可证)

- 只要软件中包含了遵循本协议的产品或代码,该软件就必须也遵循 GPL 许可协议,也就是必须开源免费,不能闭源收费,不能作为商用软件。
GPL 开源协议的主要特点
-
复制自由 允许把软件复制到任何人的电脑中,并且不限制复制的数量。
-
传播自由 允许软件以各种形式进行传播。
-
收费传播 允许在各种媒介上出售该软件,但必须提前让买家知道这个软件是可以免费获得的;因此,一般来讲,开源软件都是通过为用户提供有偿服务的形式来盈利的。
-
修改自由 允许开发人员增加或删除软件的功能,但软件修改后必须依然基于GPL许可协议授权。
相关教程及交流群
本系列教程文章专栏:
本系列课程已上线古月学院,欢迎感兴趣的小伙伴订阅:
开发交流QQ群: 797497206