mirror of
https://github.com/chengyangkj/Ros_Qt5_Gui_App.git
synced 2025-09-15 12:58:58 +08:00
Some checks are pending
ROS2:Foxy(20.04) / release (map[image:ubuntu:focal ros:foxy]) (push) Waiting to run
ROS2:galactic(20.04) / release (map[image:ubuntu:focal ros:galactic]) (push) Waiting to run
ROS2:Humble(22.04) / release (map[image:ubuntu:jammy ros:humble]) (push) Waiting to run
ROS1:Melodic(18.04) / release (map[image:ubuntu:bionic ros:melodic]) (push) Waiting to run
ROS1:Noetic(20.04) / release (map[image:ubuntu:focal ros:noetic]) (push) Waiting to run
3.3 KiB
3.3 KiB
功能使用指南
地图显示与编辑
地图显示
软件支持显示全局地图和局部地图,地图数据来自 ROS 话题。
要启用地图显示,请确保 config.json 中有以下配置:
{
"topics": {
"map": {
"display_name": "Map",
"topic": "/map",
"enable": true
}
}
}
地图编辑
提供以下编辑功能:

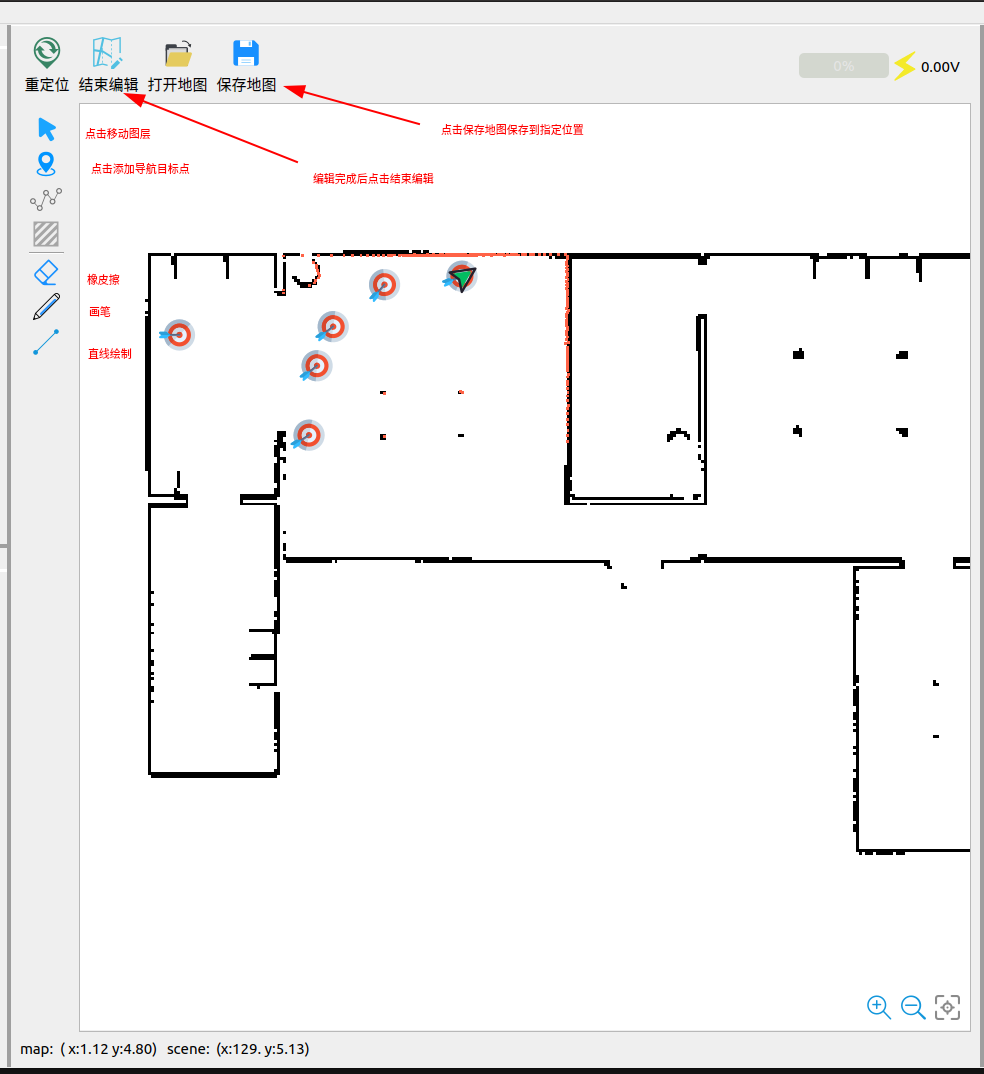
拓扑地图
支持拖拽设置机器人导航目标点:

注意:如果导航点发布无响应,请检查以下配置:
{
"move_base_simple": {
"display_name": "NavGoal",
"topic": "/move_base_simple/goal",
"enable": true
}
}
橡皮擦工具
点击橡皮擦可以擦除地图中的障碍物:
画笔工具
使用画笔绘制障碍物:

线段绘制
在地图上绘制直线:

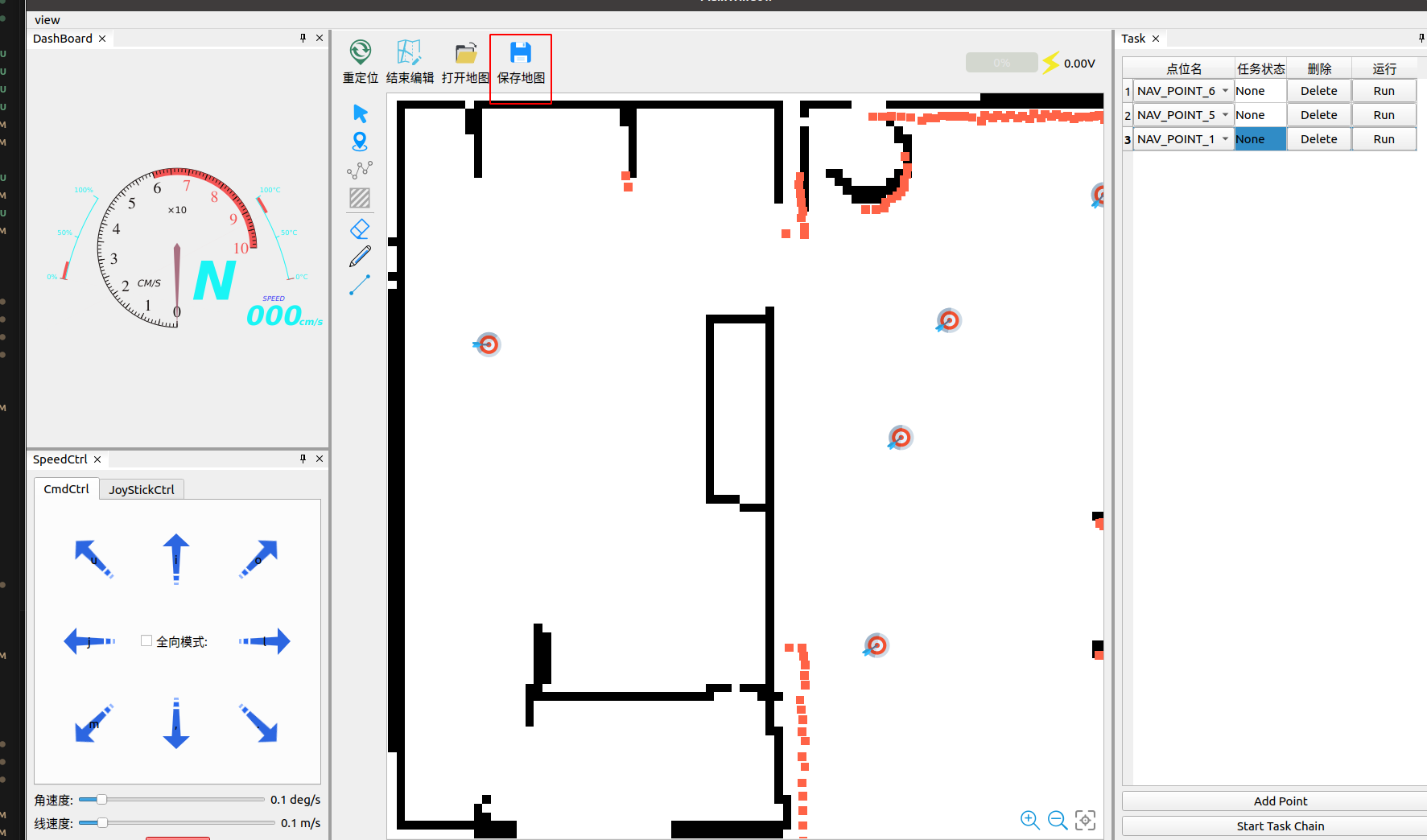
地图保存
编辑完成后,点击保存按钮保存:
- *.pgm - 图像数据
- *.yaml - 地图描述文件
- *.topology - 拓扑数据(导航点信息)
机器人控制
手动控制
使用键盘或界面按钮控制机器人:

注意:请检查手动控制的配置:
{
"velocity": {
"display_name": "Speed",
"topic": "/cmd_vel",
"enable": true
}
}
机器人重定位
左键按住拖动设置位置,右键旋转方向:


注意:确保正确配置:
{
"initialpose": {
"display_name": "Reloc",
"topic": "/initialpose",
"enable": true
}
}
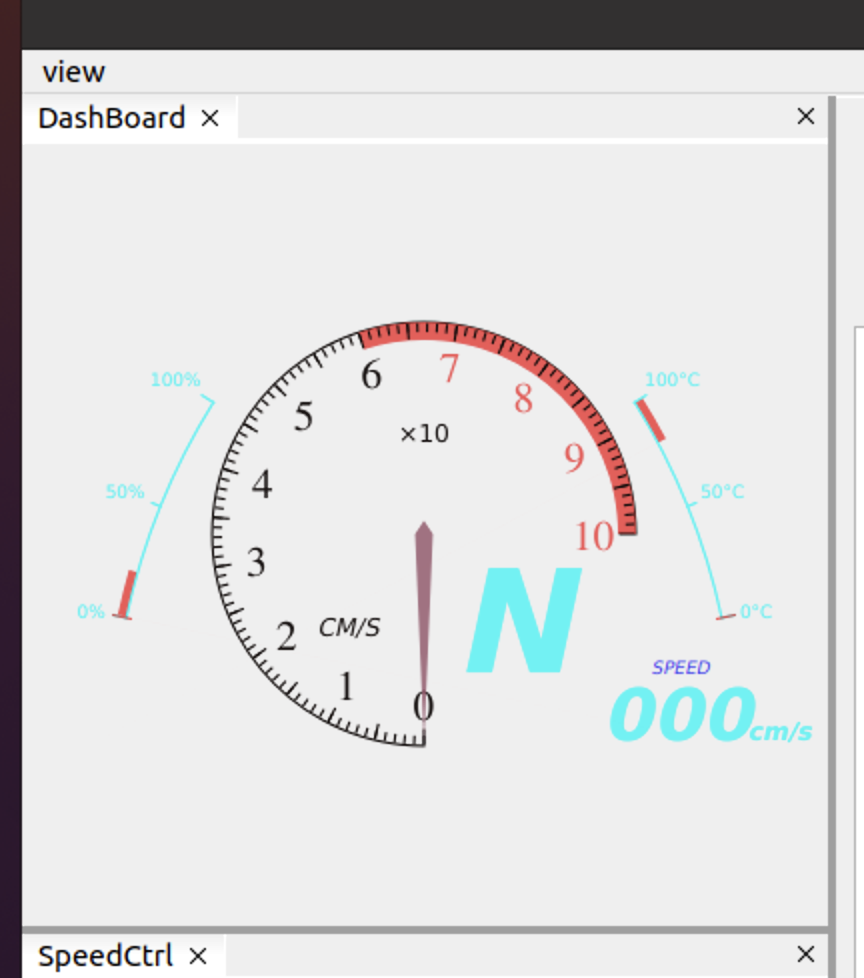
速度仪表盘
实时显示机器人速度:
需要的配置:
{
"odom": {
"display_name": "Odometry",
"topic": "/odom",
"enable": true
}
}
电池显示
显示实时电池状态:
配置(使用 sensor_msgs::BatteryState):
{
"battery": {
"display_name": "Battery",
"topic": "/battery",
"enable": true
}
}
导航功能
多点导航
设置多个导航点按顺序执行:


使用步骤:
- 添加导航点
- 设置执行顺序
- 点击"开始任务"按钮
- 监控任务进度
相机显示
支持多路相机图像:
- RGB和深度图像
- 压缩传输
- 移植自 rqt_image_view
配置示例:
{
"images": [
{
"location": "front",
"topic": "/camera/rgb/image_raw",
"enable": true
},
{
"location": "front/depth",
"topic": "/camera/depth/image_raw",
"enable": true
}
]
}
机器人车身显示
支持多种车身形状:
- 矩形
- 圆形
- 自定义形状
配置示例:
{
"robot_shape_config": {
"shaped_points": [
{"x": 0.5, "y": 0.5},
{"x": 0.5, "y": -0.5},
{"x": -0.5, "y": -0.5},
{"x": -0.5, "y": 0.5}
],
"is_ellipse": false,
"color": "0x00000FF",
"opacity": 0.5
}
}