mirror of
https://github.com/6-robot/wpr_simulation.git
synced 2025-09-15 12:59:01 +08:00
仿真项目3:
克隆WPR系列机器人仿真工具
| launch | ||
| maps | ||
| media | ||
| meshes | ||
| rviz | ||
| src | ||
| urdf | ||
| worlds | ||
| .gitignore | ||
| CMakeLists.txt | ||
| LICENSE | ||
| package.xml | ||
| README.md | ||
WPR系列机器人仿真工具
准备工作
- 安装ROS桌面完整版(Kinetic/Ubuntu 16.04):
sudo apt-get install ros-kinetic-desktop-full
由于Indigo/Ubuntu 14.04集成的Gazebo版本太过古老,所以无法进行支持,建议升级到Kinetic/Ubuntu 16.04。
- 获取源码:
cd ~/catkin_ws/src/
git clone https://github.com/6-robot/wpr_simulation.git
- 编译
cd ~/catkin_ws
catkin_make
使用说明
1. 启智ROS机器人
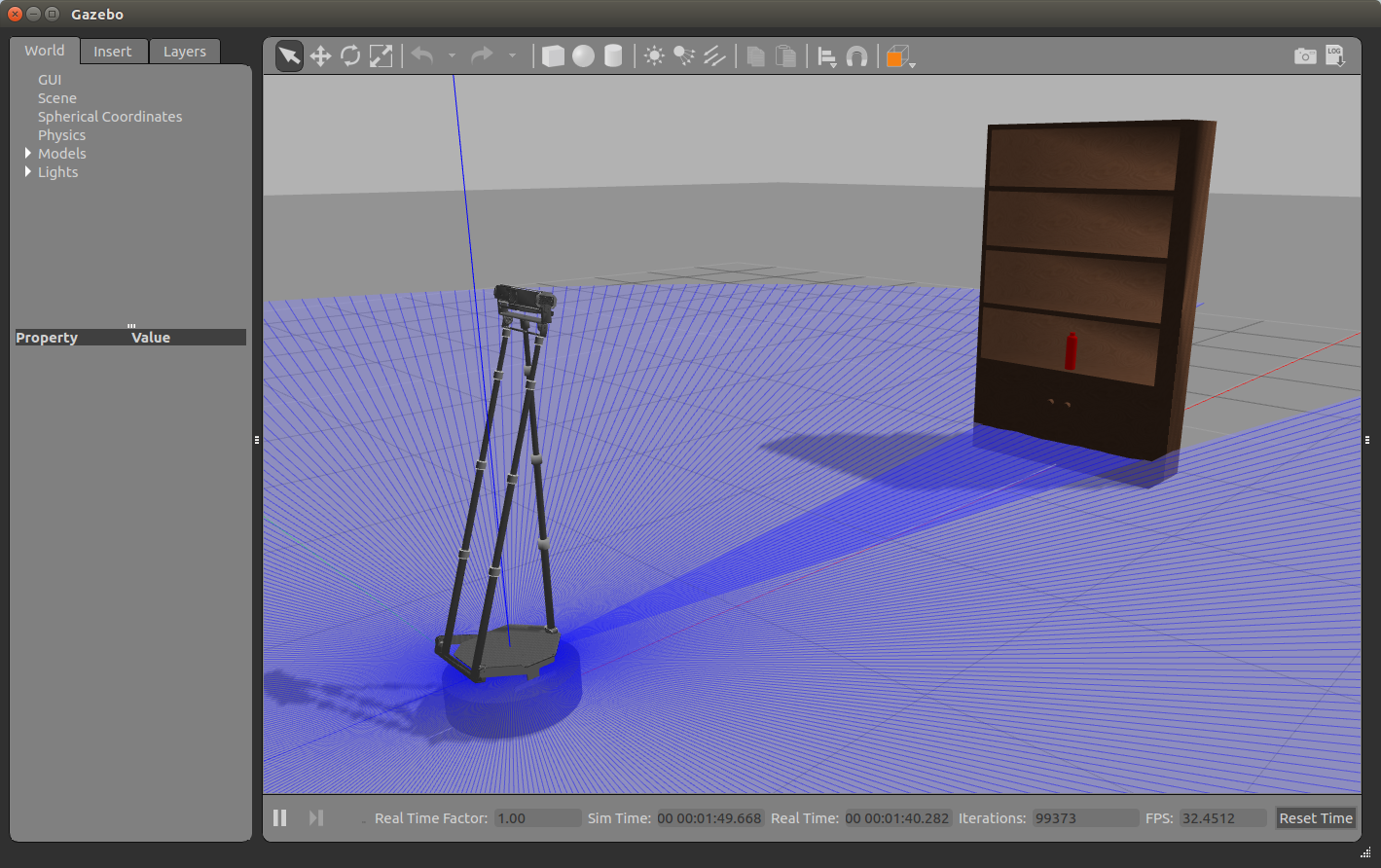
简单场景:
roslaunch wpr_simulation wpb_simple.launch
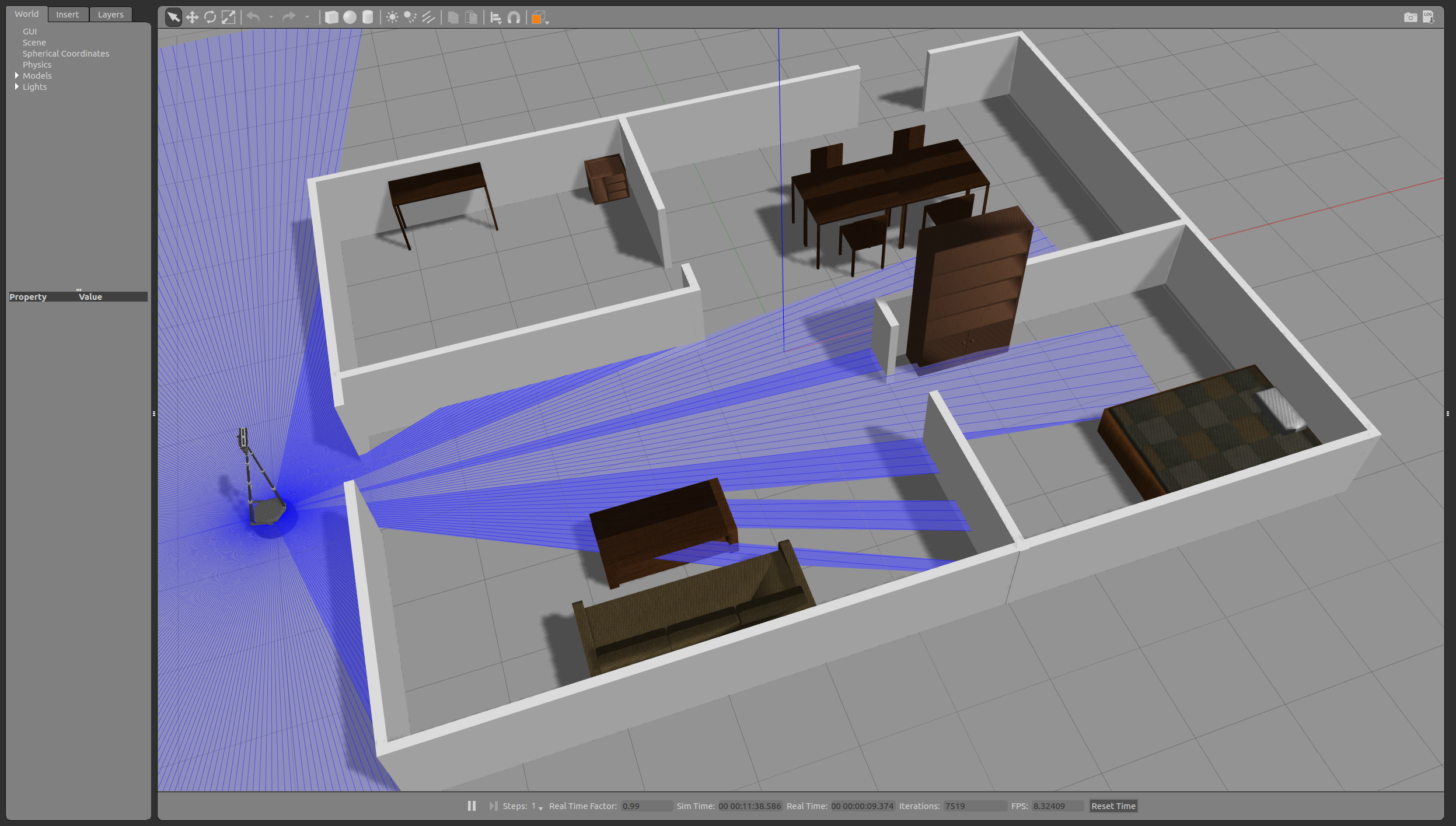
SLAM环境地图创建:
roslaunch wpr_simulation wpb_gmapping.launch
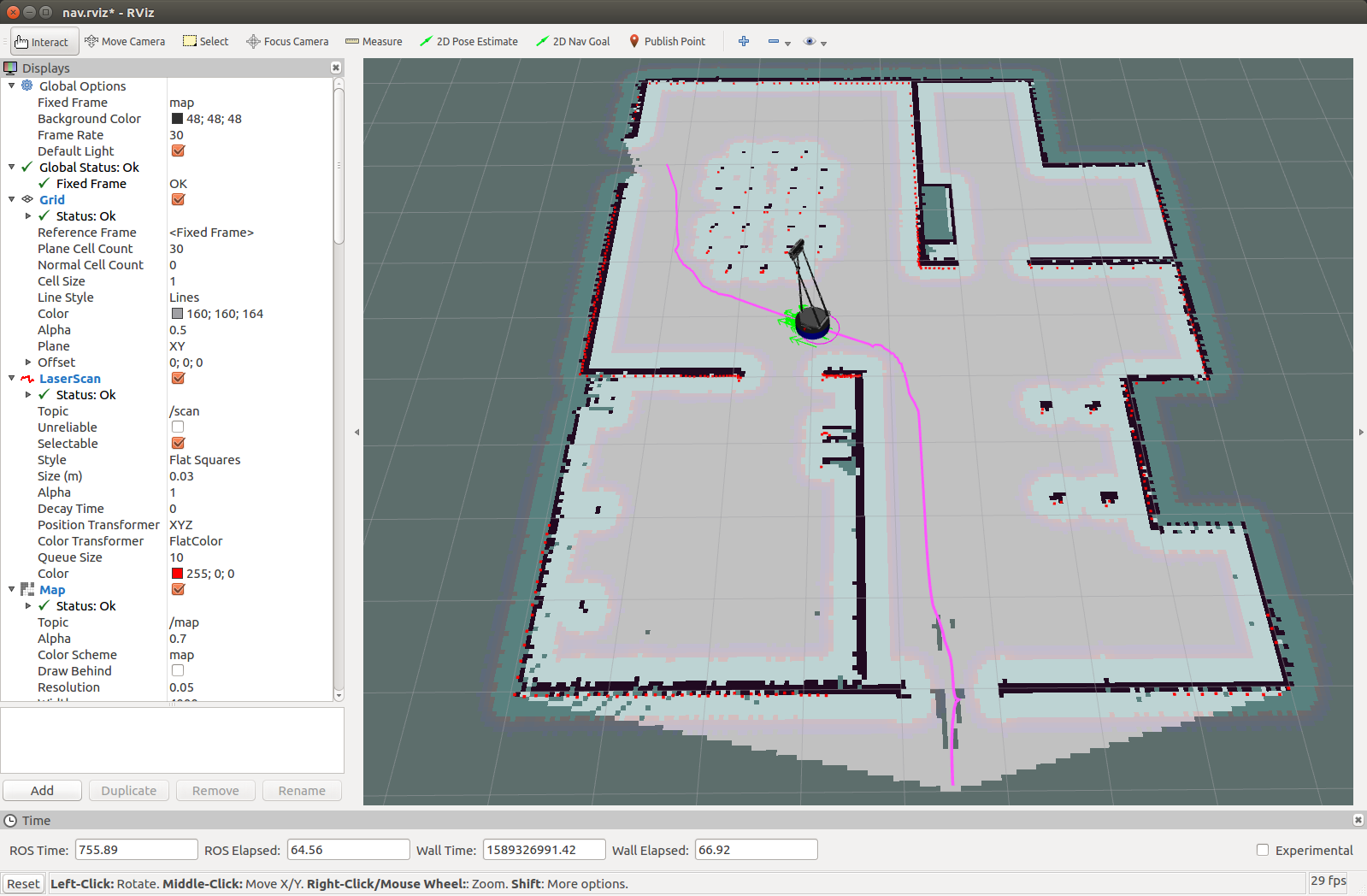
Navigation导航:
roslaunch wpr_simulation wpb_navigation.launch