mirror of
https://github.com/chengyangkj/Ros_Qt5_Gui_App.git
synced 2025-09-15 12:58:58 +08:00
轻量级ROS1/ROS2移动机器人人机交互软件
| include/cyrobot_monitor | ||
| resources | ||
| src | ||
| ui | ||
| CMakeLists.txt | ||
| CMakeLists.txt.user | ||
| mainpage.dox | ||
| package.xml | ||
| README.md | ||
ROS Qt Deskotp GUI Apps
Use qt5 to implement the development of the human-machine interface of ros robots 使用qt5实现ros机器人人机界面开发
一,Features
一,功能介绍
1,Speed dashboard
1,速度仪表盘
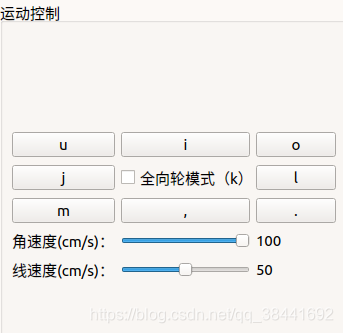
2,Robot speed control
2, 机器人速度控制
3,Power display
3, 电量显示

4,rviz module
4, rviz模块

4.1 Subscribe to map topics
4.1 订阅map话题
4.2 To be perfected
4.2 待完善
二,安装教程
二,Installation tutorial
1,首先安装ros对qt pkg的支持
1,first install ros support for qt pkg
sudo apt-get install ros-melodic-qt-create
sudo apt-get install ros-melodic-qt-build
sudo apt-get install qtcreator
2,Compile
2,编译
Put the package in the ros src package directory: 将软件包放入ros src软件包目录下:
catkin_make
3,run
3,运行
rosrun cyrobot_monitor cyrobot_monitor