mirror of
https://github.com/chengyangkj/Ros_Qt5_Gui_App.git
synced 2025-09-15 12:58:58 +08:00
Update README.md
This commit is contained in:
parent
54e3608fc0
commit
dad435c2f3
53
README.md
53
README.md
@ -33,19 +33,14 @@ sudo apt-get install ros-melodic-qt-create
|
||||
```cpp
|
||||
sudo apt-get install ros-melodic-qt-build
|
||||
```
|
||||
·
|
||||
#### 2,安装Qt相关依赖
|
||||
#### 2,安装Qtmultimedia5依赖
|
||||
|
||||
程序依赖Qtmultimedia实现音频功能,因此需要安装音频依赖
|
||||
程序依赖Qtmultimedia实现音频功能,因此需要安装依赖
|
||||
|
||||
```cpp
|
||||
sudo apt-get install qtmultimedia5-dev
|
||||
```
|
||||
QChart绘图依赖:
|
||||
|
||||
```cpp
|
||||
sudo apt-get install libqt5charts5-dev
|
||||
```
|
||||
#### 3,编译
|
||||
|
||||
将软件包放入ros src软件包目录下:
|
||||
@ -132,8 +127,48 @@ rosrun cyrobot_monitor cyrobot_monitor
|
||||
- 使用前须在菜单->设置->话题设置中设置电量话题(Std_msg/Float32)
|
||||
|
||||

|
||||
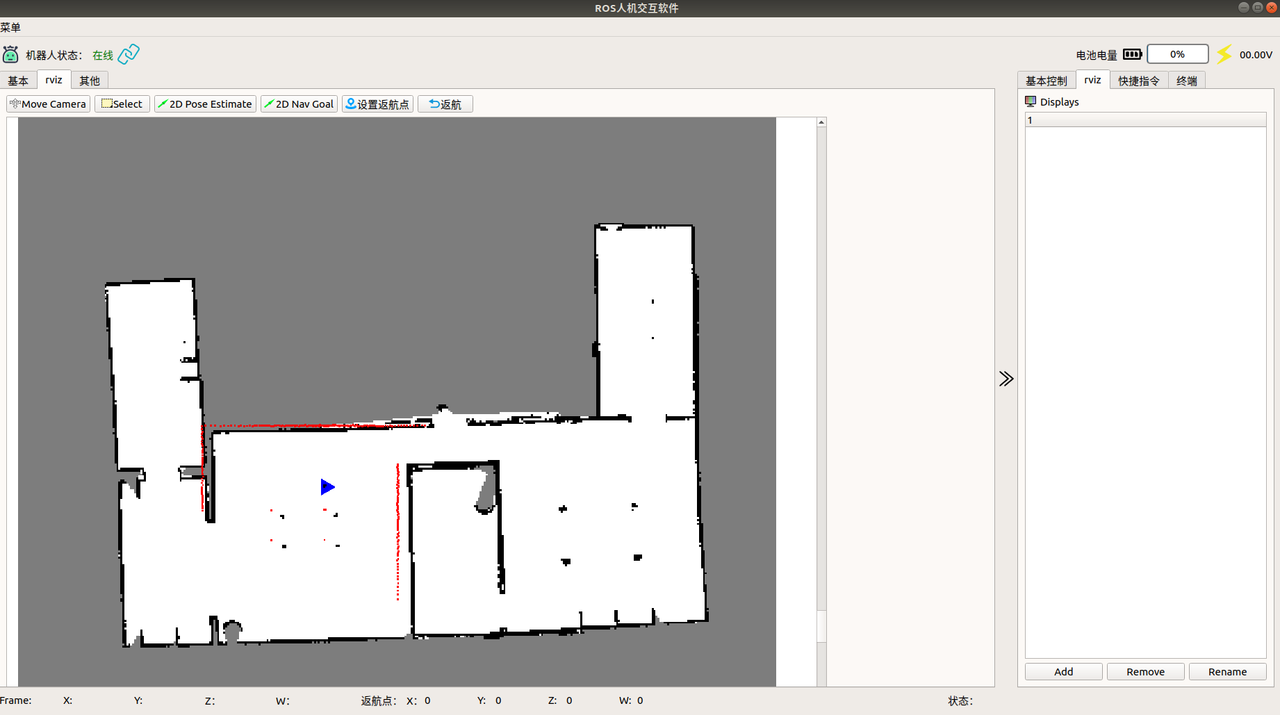
#### 4, 地图显示模块
|
||||
|
||||
#### 4, rviz模块
|
||||

|
||||
##### 4.1 订阅map话题
|
||||
|
||||
|
||||
##### 4.2 激光雷达图层显示
|
||||
|
||||
|
||||
##### 4.3 设置导航初始点
|
||||

|
||||
|
||||
##### 4.4 设置导航目标点
|
||||
|
||||
|
||||
##### 4.5 定点返航
|
||||
|
||||
- 使用前须在菜单->设置->话题设置中设置amcl话题
|
||||
|
||||
|
||||
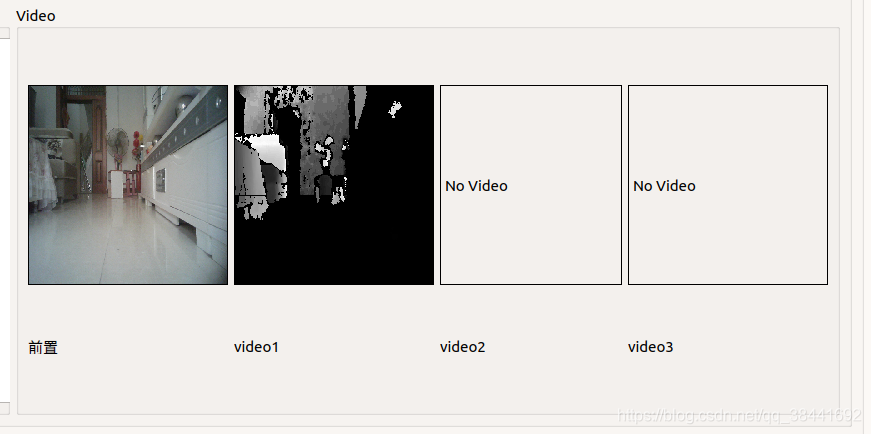
##### 4.6 订阅图像话题
|
||||
|
||||
- 提供四个图像显示窗体,可以同时显示四个图像 解决卡顿问题,在video0订阅(image_raw/compressed)即compressed后的图像即可不卡顿,且video0只能订阅压缩后的图像
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
##### 4.7 快捷指令
|
||||

|
||||

|
||||
|
||||
##### 4.8 显示机器人模型
|
||||
|
||||
|
||||
##### 4.9 提供六种rviz工具
|
||||

|
||||
|
||||
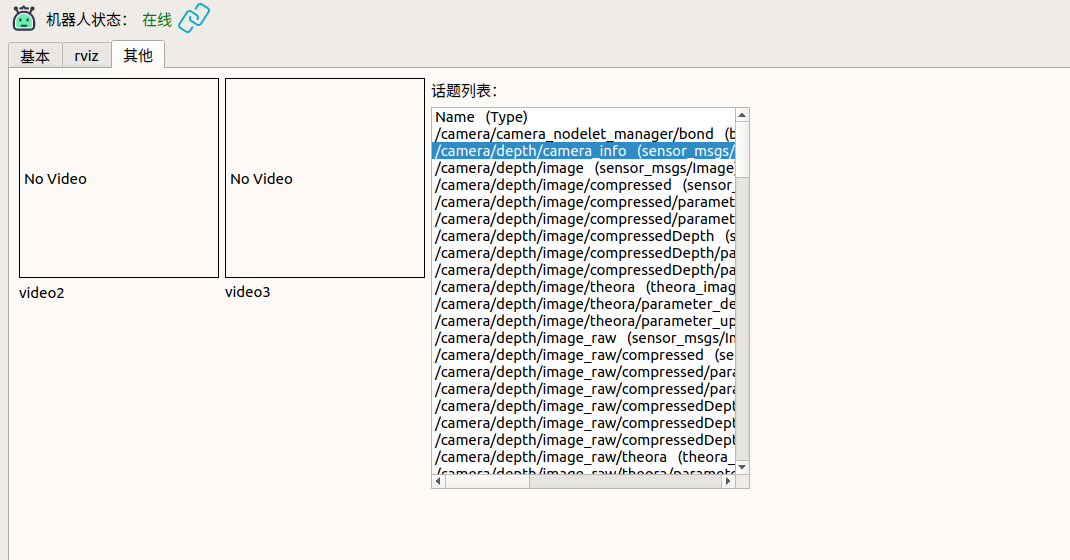
##### 4.10 显示话题列表
|
||||
[](https://postimg.cc/svL6bJsK)
|
||||
.
|
||||
##### 4.11 待完善....
|
||||
|
||||
|
||||
## 开源协议
|
||||
**GNU GPL(GNU General Public License,GNU通用公共许可证)**
|
||||
|
||||
Loading…
Reference in New Issue
Block a user