Mapviz
======
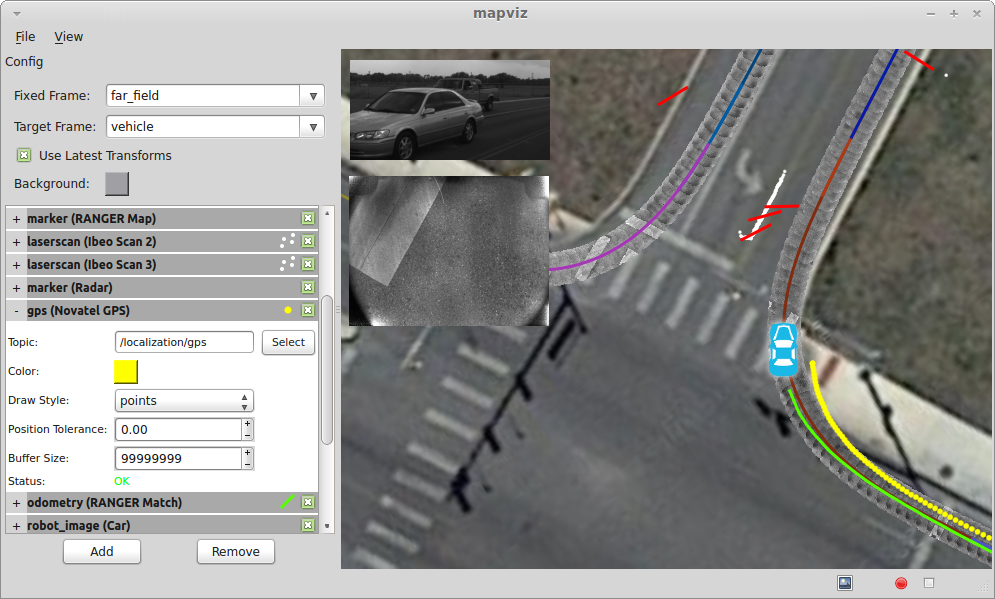
Mapviz is a [ROS](http://www.ros.org/) based visualization tool with a plug-in system similar to [RVIZ](http://wiki.ros.org/rviz) focused on visualizing 2D data.
Build Status
------------
Package | Indigo (Saucy) | Indigo (Trusty) | Jade (Trusty) | Jade (Utopic) | Jade (Vivid)
------- | -------------- | --------------- | ------------- | ------------- | ------------
mapviz (32-bit) | [](http://jenkins.ros.org/job/ros-indigo-mapviz_binarydeb_saucy_i386/) | [](http://jenkins.ros.org/job/ros-indigo-mapviz_binarydeb_trusty_i386/) | [](http://jenkins.ros.org/job/ros-jade-mapviz_binarydeb_trusty_i386/) | [](http://jenkins.ros.org/job/ros-jade-mapviz_binarydeb_utopic_i386/) | [](http://jenkins.ros.org/job/ros-jade-mapviz_binarydeb_vivid_i386/) |
mapviz (64-bit) | [](http://jenkins.ros.org/job/ros-indigo-mapviz_binarydeb_saucy_amd64/) | [](http://jenkins.ros.org/job/ros-indigo-mapviz_binarydeb_trusty_amd64/) | [](http://jenkins.ros.org/job/ros-jade-mapviz_binarydeb_trusty_amd64/) | [](http://jenkins.ros.org/job/ros-jade-mapviz_binarydeb_utopic_amd64/) | [](http://jenkins.ros.org/job/ros-jade-mapviz_binarydeb_vivid_amd64/) |
mapviz_plugins (32-bit) | [](http://jenkins.ros.org/job/ros-indigo-mapviz-plugins_binarydeb_saucy_i386/) | [](http://jenkins.ros.org/job/ros-indigo-mapviz-plugins_binarydeb_trusty_i386/) | [](http://jenkins.ros.org/job/ros-jade-mapviz-plugins_binarydeb_trusty_i386/) | [](http://jenkins.ros.org/job/ros-jade-mapviz-plugins_binarydeb_utopic_i386/) | [](http://jenkins.ros.org/job/ros-jade-mapviz-plugins_binarydeb_vivid_i386/) |
mapviz_plugins (64-bit) | [](http://jenkins.ros.org/job/ros-indigo-mapviz-plugins_binarydeb_saucy_amd64/) | [](http://jenkins.ros.org/job/ros-indigo-mapviz-plugins_binarydeb_trusty_amd64/) | [](http://jenkins.ros.org/job/ros-jade-mapviz-plugins_binarydeb_trusty_amd64/) | [](http://jenkins.ros.org/job/ros-jade-mapviz-plugins_binarydeb_utopic_amd64/) | [](http://jenkins.ros.org/job/ros-jade-mapviz-plugins_binarydeb_vivid_amd64/) |
multires_image (32-bit) | [](http://jenkins.ros.org/job/ros-indigo-multires-image_binarydeb_saucy_i386/) | [](http://jenkins.ros.org/job/ros-indigo-multires-image_binarydeb_trusty_i386/) | [](http://jenkins.ros.org/job/ros-jade-multires-image_binarydeb_trusty_i386/) | [](http://jenkins.ros.org/job/ros-jade-multires-image_binarydeb_utopic_i386/) | [](http://jenkins.ros.org/job/ros-jade-multires-image_binarydeb_vivid_i386/) |
multires_image (64-bit) | [](http://jenkins.ros.org/job/ros-indigo-multires-image_binarydeb_saucy_amd64/) | [](http://jenkins.ros.org/job/ros-indigo-multires-image_binarydeb_trusty_amd64/) | [](http://jenkins.ros.org/job/ros-jade-multires-image_binarydeb_trusty_amd64/) | [](http://jenkins.ros.org/job/ros-jade-multires-image_binarydeb_utopic_amd64/) | [](http://jenkins.ros.org/job/ros-jade-multires-image_binarydeb_vivid_amd64/) |
tile_map (32-bit) | [](http://jenkins.ros.org/job/ros-indigo-tile-map_binarydeb_saucy_i386/) | [](http://jenkins.ros.org/job/ros-indigo-tile-map_binarydeb_trusty_i386/) | [](http://jenkins.ros.org/job/ros-jade-tile-map_binarydeb_trusty_i386/) | [](http://jenkins.ros.org/job/ros-jade-tile-map_binarydeb_utopic_i386/) | [](http://jenkins.ros.org/job/ros-jade-tile-map_binarydeb_vivid_i386/) |
tile_map (64-bit) | [](http://jenkins.ros.org/job/ros-indigo-tile-map_binarydeb_saucy_amd64/) | [](http://jenkins.ros.org/job/ros-indigo-tile-map_binarydeb_trusty_amd64/) | [](http://jenkins.ros.org/job/ros-jade-tile-map_binarydeb_trusty_amd64/) | [](http://jenkins.ros.org/job/ros-jade-tile-map_binarydeb_utopic_amd64/) | [](http://jenkins.ros.org/job/ros-jade-tile-map_binarydeb_vivid_amd64/) |
Installation (ROS Indigo)
------------
In ROS Indigo, you can install mapviz using apt-get from the ROS apt repository. This is the recommended installation method for ROS Indigo. ROS Jade builds are coming soon.
sudo apt-get install ros-indigo-mapviz
Building From Source (ROS Indigo, Jade)
------------
These directions assume you have already set up a catkin workspace. See [this tutorial](http://wiki.ros.org/catkin/Tutorials/create_a_workspace) on the ROS Wiki for help setting up a catkin workspace.
### Checking out the source code (wstool)
If you're using wstool, add this repository to your wstool workspace:
wstool set mapviz --git https://github.com/swri-robotics/mapviz.git -v indigo-devel
In ROS Jade, you must also build these dependencies from source, so you'll have to add them as well:
wstool set marti_messages --git https://github.com/swri-robotics/marti_messages.git -v indigo-devel
wstool set marti_common --git https://github.com/swri-robotics/marti_common.git -v indigo-devel
### Checking out the source code (git)
If you're not using wstool, you can check out the repositories with git:
git clone https://github.com/swri-robotics/mapviz.git --branch indigo-devel
In ROS Jade, you must also build these dependencies from source, so you'll have to add them as well:
git clone https://github.com/swri-robotics/marti_messages.git --branch indigo-devel
git clone https://github.com/swri-robotics/marti_common.git --branch indigo-devel
### Installing dependencies and building
Install all of the dependencies using rosdep by running the following command from the root of your catkin workspace:
rosdep install --from-paths src --ignore-src
Build the workspace with catkin_make:
catkin_make
Plug-ins
--------
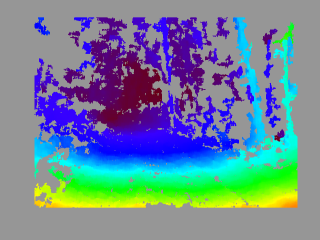
### Disparity
Overlays a [sensor_msgs::DisparityImage](http://docs.ros.org/api/stereo_msgs/html/msg/DisparityImage.html) onto the display using the ''jet'' color map.
**Parameters**
* Topic: The disparity topic name
* Anchor: (top left | top center | top right | center left | center | center right | bottom left | bottom center | bottom right)
* Offset X: Display offset from the left
* Offset Y: Display offset from the top
* Width: Display width
* Height: Display height
* Units: (pixels | percent of window)
### Grid
Projects a 2D grid into the scene.
**Parameters**
* Frame: Coordinate frame of the grid
* Color: Color of the grid
* Alpha: Alpha transparency of the grid
* X: X offset of the grid from the specified coordinate frame origin
* Y: Y offset of the grid from the specified coordinate frame origin
* Size: Size of each grid cell
* Rows: Number of grid rows
* Columns: Number of grid columns
### Image
Overlays a [sensor_msgs::Image](http://docs.ros.org/api/sensor_msgs/html/msg/Image.html) onto the display.
**Parameters**
* Topic: The image topic name
* Anchor: (top left | top center | top right | center left | center | center right | bottom left | bottom center | bottom right)
* Offset X: Display offset from the left
* Offset Y: Display offset from the top
* Width: Display width
* Height: Display height
* Units: (pixels | percent of window)
### LaserScan
Projects a [sensor_msgs::LaserScan](http://docs.ros.org/api/sensor_msgs/html/msg/LaserScan.html) message into the scene.
* Topic: The laser scan topic name
* Min Color: The color associated with minimum return intensity
* Max Color: The color associated with maximum return intensity
* Min Intesity: Minimum intensity value
* Max Intensity: Maximum intensity value
* Point Size: Display size of laser scan points in pixels
* Buffer Size: Size of circular buffer of laser scan messages points
### Marker
Projects a [visualization_msgs::Marker](http://docs.ros.org/api/visualization_msgs/html/msg/Marker.html) or [visualization_msgs::MarkerArray](http://docs.ros.org/api/visualization_msgs/html/msg/MarkerArray.html) into the scene.
[Markers](http://wiki.ros.org/rviz/DisplayTypes/Marker) are the most flexible display type and more or less mirror the [OpenGL primitives](https://www.opengl.org/wiki/Primitive).
**Parameters**
* Topic: The marker topic
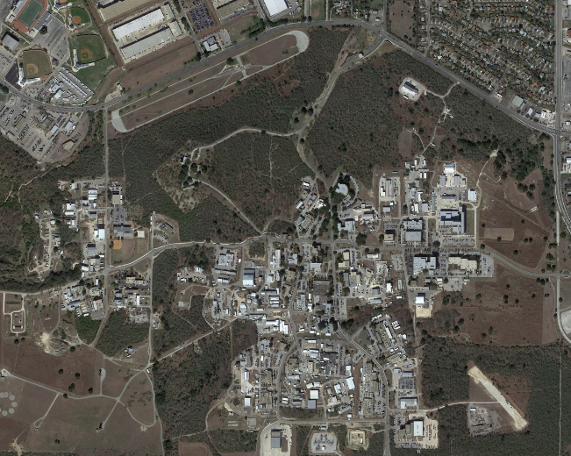
### Multi-res Image
Projects a geo-referenced multi-resolution image tile map into the scene. The concept is the same as the Google Maps style pan/zoom satellite imagery.
**Parameters**
* Geo File: Path to the geo-referenced map tiles.
A custom format is currently used to store the map tiles and geo-reference. The geo-file has the following format:
image_path: "." # The relative path to the map tiles
image_width: 29184 # The full pixel width of the map
image_height: 15872 # The full pixel height of the map
tile_size: 512 # The pixel size of the individual tiles
datum: "wgs84" # Datum is currently ignored
projection: "utm" # (utm|wgs84)
# At least 2 tie points are required for
# scale, and 3 for orientation.
tiepoints: # [pixel x, pixel y, geo x, geo y]
- point: [4799, 209, 535674.5, 3258382.5]
- point: [2336, 15596, 535329.5, 3256198.5]
- point: [26925, 15457, 538837.5, 3256233.5]
- point: [29133, 84, 539142.5, 3258416.5]
The map tiles are stored in directories for each resolution starting with layer0, the full resolution. In subsequent layers the resolution is halved until the entire map fits within a single tile.
Tiles are named using the following format:
tile%05dx%05d.png % (row, column)
### Odometry
Projects [nav_msgs::Odometry](http://docs.ros.org/api/nav_msgs/html/msg/Odometry.html) message data into the scene.
**Parameters**
* Topic: The odometry topic
* Color: The color of the odometry data
* Draw Style: (lines | points | arrows)
* Show Covariance: Draw covariance ellipse around latest data
* Position Tolerance: Distance threshold for adding new odometry points to visualization
* Buffer Size: Size of circular buffer of odometry points
### Path
Projects [nav_msgs::Path](http://docs.ros.org/api/nav_msgs/html/msg/Path.html) message data into the scene.
**Parameters**
* Topic: The path topic
### Robot Image
Projects an image loaded from file into the scene to represent the robot platform.
**Parameters**
* Image File: Path to the image file
* Frame: Frame to tie the image to
* Width: The physical width represented by the image
* Height: The physical height represented by the image
### Textured Marker
Projects marti_visualization_msgs::TexturedMarker and marti_visualization_msgs::TexturedMarkerArray message data into the scene.
Textured markers follow the same general approach as traditional markers, but can be used to texture dense image data onto a quad which is projected into the scene.
**Parameters**
* Topic: The textured marker topic
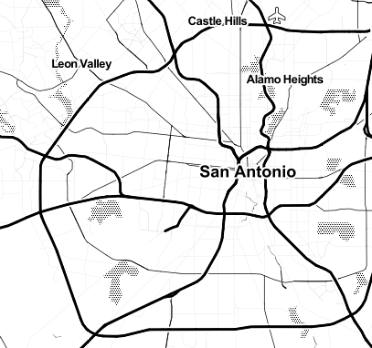
### Tile Map
Projects a geo-referenced multi-resolution image tile map into the scene. Data is automatically streamed from [OpenMapQuest](http://open.mapquest.com/) (satellite and roads) or [Stamen Design] (http://maps.stamen.com/) (terrain, watercolor, and toner). Custom or local map servers can also be specified. Map data is cached to disk which enables some limited use completely offline.




 **Parameters**
* Source: The source of the tile data.
### TF Frame
Projects [Tf](http://wiki.ros.org/tf) data into the scene similar to the Odometry plug-in.
**Parameters**
* Frame: The Tf frame
* Color: The color of the Tf data
* Draw Style: (lines | points | arrows)
* Position Tolerance: Distance threshold for adding new Tf points to visualization
* Buffer Size: Size of circular buffer of Tf points
**Parameters**
* Source: The source of the tile data.
### TF Frame
Projects [Tf](http://wiki.ros.org/tf) data into the scene similar to the Odometry plug-in.
**Parameters**
* Frame: The Tf frame
* Color: The color of the Tf data
* Draw Style: (lines | points | arrows)
* Position Tolerance: Distance threshold for adding new Tf points to visualization
* Buffer Size: Size of circular buffer of Tf points